ROSA Files
ROSA robot file¶
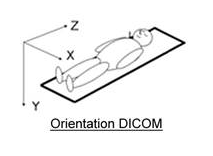
All the coordinates in the .ros file are defined based off the first image loaded into the system (the base image). The reference system origin is the center of the base image and orientation is DICOM orientation (below).
Details of the DICOM coordinate system¶
DICOM is a standard for handling digital imaging in medicine. DICOM is also used for ultrasound and X-ray photography and each DICOM file by itself stores a 2D image. For MRI data a stack of those files is used to describe the volumetric data and the origin is at the magnet isocenter, which coincides with the center of the gradient coils. The definition of the coordinate system is
the origin is at the scanner origin, which is the center of the gradient coil - x increases from right to left - y increases from anterior to posterior - z increases from inferior to superior - (LPS coordinate system)
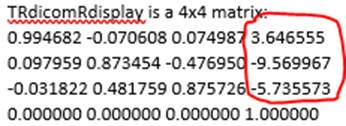
The TRdicomRdisplay for each image describes the transformation function needed to align each image with the base image – thus the TRdicomRdisplay for the first image is always the identity matrix. This is explained in more detail below.
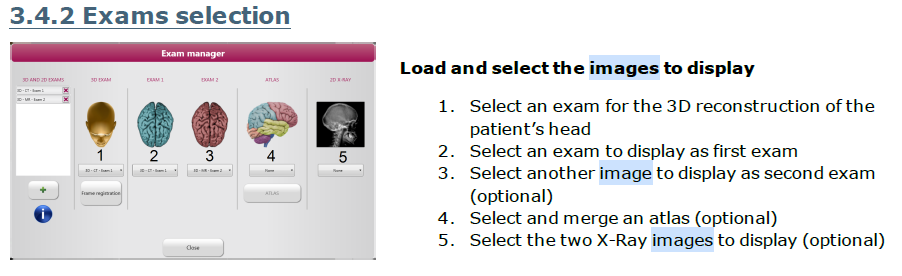
IMAGERY_3DREF is just used to denote which image is selected as the 3D reconstruction in the Exam Manager (#1). It doesn’t define any coordinate system or anything.
Trajectory data¶
ACPC and marker coordinates are in a similar format, all numbers are in mm. Again the origin is the center of the base image.
[TRAJECTORY]
4
1^L^Frontal^HTP 0 6168997 1 38.489880 -64.386010 13.4468201 13.068530 -33.943740 -10.392820200.000000 2.000000
4 (number of trajectories)
1^L^Frontal^HTP (trajectory name)
0 (trajectory type 0 = stereotaxy, 1 = endoscopy)
6168997 (trajectory color)
1 (entry point defined – 0 if not)
38.489880 -64.386010 13.446820(entry point coordinates x, y, z, in mm, in the reference system of the first exam loaded*)
1 (target point defined – 0 if not)
13.068530 -33.943740 -10.392820(target point coordinates x, y, z, in mm, in the reference system of the first exam loaded*)
200.000000 (associated instrument length)
2.000000 (associated instrument diameter)
- Only rotations/translations performed (rigid transformations), no shear or scaling
- Rotations applied around the center of the image
- Registration matrix in ROSANNA are all rigid (3 translations / 3 rotations)
Origin of an exam coordinate system¶
For information, the origin of an exam coordinate system is the center of the volume.
Ex: for and exam 256256151 the 0,0,0 coordinates is:
- In X between the 128 and the 129th voxel
- In Y between the 128 and the 129th voxel
- In Z the center of the 76th voxel
In other words:
- Volume width = nb voxels in X * resolution voxel in X
- Volume height = nb voxels in Y * resolution voxel in Y
- Volume depth = nb voxels in Z * resolution voxel in Z
So the voxel with coordinates (in voxel) 0,0,0 has for coordinates (in mm):
- VolumeWidth / 2mm
- VolumeHeight / 2mm
- VolumeDepth / 2mm